

Walking Control of Human with Redundant Body
Walking movement is composed with more than 7 joints and tens to hundreds of muscles, although, the elemental motion of cyclic walking can be realized with only a few links, as is represented by passive dynamic walking. Such a redundancy generates diversity in motion patterns and it possibly contributes the adaptability. However, the redundancy at the same time generates difficulty in control by non-uniqueness of possible motion patterns. Human is considered to conquer this problem of degrees of freedom by actuating many movable elements with keeping mutual correlation. Then we have assumed that this coordination of the actuators called synergy has been a key for the human adaptability, and have analyzed human movement with taking my focus on the synergy.
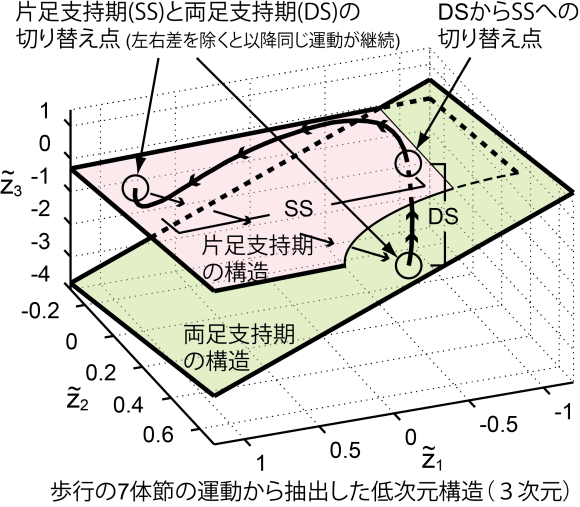
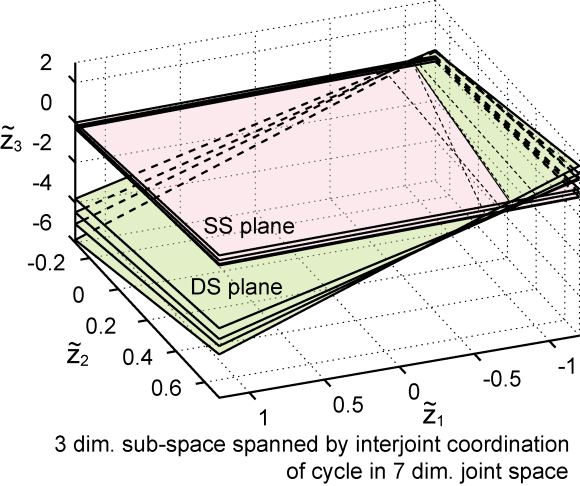
We have measured human motion with motion capturing system, electromyogram and ground reaction sensors. Then we have extracted the most correlated series: synergy from the measured kinematic data using statistical analysis, and performed statistical and dynamical analysis on the extracted motion patterns. Our results are as follows:
- We discussed how human motion changed depending on the walking speeds and slopes, and showed human strategy for adapting to its walking condition; human used rhythmic pattern invariant to condition and tuned its intersegmental relationship (synergy) (Funato et al., Experimental Brain Research, 2010)
- Contribution of synergy on control was discussed by comparing the fluctuation of motion corresponding to synergy, COM and head. The result showed smallest fluctuation with synergy, supporting the assumption that synergy was used for feedback of motion control (Funato et al., Experimental Brain Research, 2015)
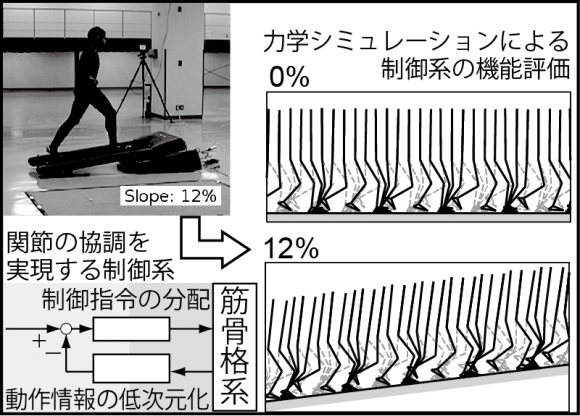
- A dynamical simulation with feedback control via synergy was performed and the effectiveness of the synergetic control for stability was shown (Funato et al. Journal of the Robotics Society of Japan, 2010. In Japanese)
Research Paper: Tetsuro Funato, et al., Journal of the Robotics Society of Japan, 2013 (in Japanese)
Research Paper: T Funato, et al., Exp Brain Res, 2010.
This research is supported in part by a Grant-in-Aid for Scientific Research on Innovative Areas (No. 15H01660) funded by the Ministry of Education, Culture, Sports, Science, and Technology of Japan.
