

Posture control Mechanism of Human
Research Paper: T Funato, et al., Royal Society Open Science, 2016.
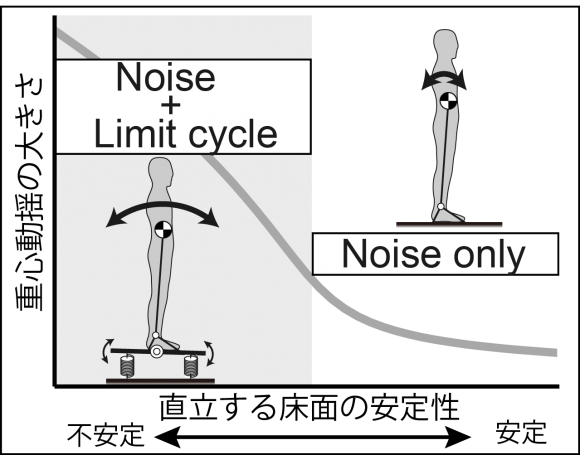
Human quiet standing is accompanied by body sway. The amplitude of this body sway is known to be larger than would be predicted from simple noise effects, and sway characteristics are changed by neurological disorders. This large sway is thought to arise from nonlinear control with prolonged periods of no control (intermittent control), and a nonlinear control system of this kind has been predicted to exhibit bifurcation. The presence of stability-dependent transition enables dynamic reaction that depends on the stability of the environment, and can explain the change in sway characteristics that accompanies some neurological disorders. This research analyzes the characteristics of a system model that induces transition, and discusses whether human standing reflects such a mechanism. In mathematical analysis of system models, (intermittent control-like) nonlinear control with integral control is shown to exhibit Hopf bifurcation. Moreover, from the analytical solution of the system model with noise, noise is shown to work to smooth the enlargement of sway around the bifurcation point. This solution is compared with measured human standing sway on floors with different stabilities. By quantitatively comparing the control parameters between human observation and model prediction, enlargement of sway is shown to appear as predicted by the model analysis.

This research is supported in part by a Grant-in-Aid for Scientific Research (B) (No. 26289063) and for Scientific Research on Innovative Areas (No. 15H01660) funded by the Ministry of Education, Culture, Sports, Science, and Technology of Japan.
